



Meet Reachy Mini: Building an AI-Powered Conference Badge Reader
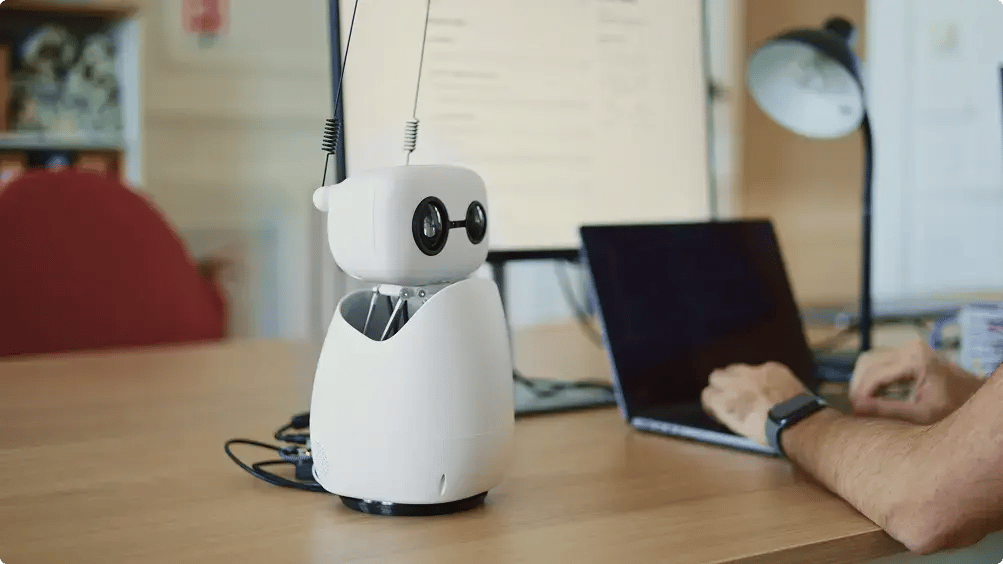
I recently got my hands on a Reachy Mini from Pollen Robotics, and I have to say—it's been one of the most enjoyable pieces of technology I've worked with in a while. The assembly happened over Christmas, which turned into an unexpected family activity. My kids were eager to help with the build, and watching their excitement as the robot came together piece by piece was fun. There's something uniquely satisfying showing your kids how code translates into actual movement and personality.
To put it through its paces, I built a conference booth application that reads attendee badges and finds their LinkedIn profiles, of course GDPR compliant with consent to use the gathered picture, recognising a thumbs up by the person. The result? A fun, interactive experience that genuinely engages people at a conference booth.
What is Reachy Mini?
Reachy Mini is a small desktop robot developed by Pollen Robotics, recently acquired by HuggingFace, focused on open-source robots.
What makes Reachy Mini interesting:
Hugging Face's acquisition of Pollen Robotics (announced April 2025) aims to merge advanced open-source AI with physical hardware, with the Reachy Mini serving as the flagship "embodied AI" platform.
The Reachy Mini is unique and superior to previous Pollen products (like the full-sized Reachy 2) primarily due to its accessibility, cost, and deep integration with the Hugging Face AI ecosystem.
The robot connects via USB-C or WiFi, with a daemon that exposes a REST API and WebSocket interface. This architecture means you can run your AI workloads on a powerful machine while the robot handles the physical interaction.
The Conference Badge App
The idea was simple: create an engaging booth experience where Reachy Mini reads conference badges and finds attendees on LinkedIn. The flow looks like this:
1. Attendee approaches → Robot looks at them, wiggles antennas excitedly
2. VLM reads badge → Display shows "Hi [Name]! Give me a thumbs up!"
3. Thumbs up detected → Robot "thinks", searches LinkedIn
4. Profile found → Celebration! Shows LinkedIn profile on TV
5. Not found → Friendly shrug and welcome message
The Tech Stack
The application combines several AI and robotics technologies:
Robot Control (reachy-mini SDK)
from reachy_mini import ReachyMini
from reachy_mini.utils import create_head_pose
import numpy as np
mini = ReachyMini()
mini.enable_motors()
# Look forward and wiggle antennas
mini.goto_target(
head=create_head_pose(pitch=-5),
duration=0.5
)
for _ in range(3):
mini.goto_target(antennas=np.deg2rad([35, -35]), duration=0.12)
mini.goto_target(antennas=np.deg2rad([-35, 35]), duration=0.12)
Vision Processing (MediaPipe)
- Person detection using pose landmarks
- Real-time badge positioning feedback
- Thumbs-up gesture recognition
Badge Reading (Claude Vision)
message = client.messages.create(
model="claude-3-5-sonnet-20241022",
messages=[{
"role": "user",
"content": [
{"type": "image", "source": {"type": "base64", "data": image_b64}},
{"type": "text", "text": BADGE_PROMPT}
]
}]
)
LinkedIn Search (Google Custom Search API)
- Configured to search only
linkedin.com/in/* - Combines name, company, and title for accurate matching
Display UI (FastAPI + WebSockets)
- Real-time state updates
- Camera preview with positioning guidance
- Beautiful result display for the TV
Making it Expressive
One of the most enjoyable parts was programming the robot's personality. The SDK makes it straightforward to create expressive animations:
async def celebration(self):
"""Excited reaction when LinkedIn profile found."""
# Quick happy nods
for _ in range(2):
self.mini.goto_target(head=create_head_pose(pitch=15), duration=0.18)
await asyncio.sleep(0.18)
self.mini.goto_target(head=create_head_pose(pitch=-8), duration=0.18)
await asyncio.sleep(0.18)
# Antenna dance party
for _ in range(4):
self.mini.goto_target(antennas=np.deg2rad([50, -50]), duration=0.1)
await asyncio.sleep(0.1)
self.mini.goto_target(antennas=np.deg2rad([-50, 50]), duration=0.1)
await asyncio.sleep(0.1)
There's also a "thinking" animation when searching (head tilt with slow antenna waves), and a friendly shrug when the profile isn't found. These small touches make a huge difference in how people interact with the robot.
Why Open Source Robotics Matters
Pollen Robotics has made both the hardware CAD files and software fully open source. This matters for several reasons. The goal is to make robotics as accessible as AI software development, removing the "closed-system" bottleneck.
The reachy_mini repository includes everything from the Python SDK to example applications and even integration with Hugging Face Spaces for app discovery.
What's Next: Local LLMs
The current implementation uses Claude's Vision API for badge reading—it works well and handles the OCR task reliably. But running everything through cloud APIs has drawbacks: latency, costs, and dependency on external services.
For the next iteration, I want to experiment with local LLMs using NVIDIA DGX Spark.
The goal would be a fully self-contained system: no cloud dependencies, faster response times, and the ability to run anywhere without internet connectivity.
Final Thoughts
There's something quite satisfying about robotics in combination with AI. It doesn't just process data but creates physical presence and personality.
Reachy Mini hits a sweet spot: accessible enough for weekend projects, capable enough for "real applications", and open to learn from and build upon. If you're interested in robotics, AI, or just want to build something fun, I'd encourage you to check it out.
And if you see Reachy Mini at a conference booth, give it a thumbs up. It'll be happy to find your LinkedIn profile (Next at ContainerDays London).
Resources
Table of Contents
What is Reachy Mini?
The Conference Badge App
Why Open Source Robotics Matters
What's Next: Local LLMs
Final Thoughts

Continue Exploring
You Might Also Like

A Pattern Language for Transformation
Browse our interactive library of 119 transformation patterns. Each one describes a specific architectural problem and a tested way to solve it, so your team can talk about real tradeoffs instead of abstract ideas.